![]()

关注WINHOO微信公众号

 电动缸/多自由度平台应用案例 >> 汽车驾驶仿真模拟
电动缸/多自由度平台应用案例 >> 汽车驾驶仿真模拟
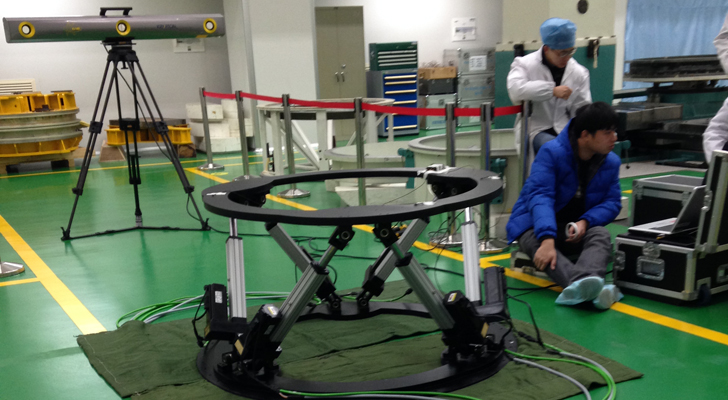
平台系统由采用Stewart机构的六自由度运动平台、微型控制器、伺服驱动系统等组成。六自由度运动平台(如下图)的下平台安装在地面上,上平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过位姿-缸长解算,通过驱动伺服电机改变电动缸缸长,以实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。

|
名称 |
P-022六自由度运动平台运动性能指标 |
|||||
|
主要技术指标 |
(1)有效载荷:1500kg,总载荷:2000kg(含平台自重)。 |
|||||
|
(2)运动参数: |
||||||
|
姿态 |
位移 |
速度 |
加速度 |
定位 精度 |
重复定 位精度 |
|
|
俯仰(α) |
≥8° |
≥20°/s |
100°/s2 |
/ |
/ |
|
|
滚转(β) |
≥8° |
≥20°/s |
100°/s2 |
/ |
/ |
|
|
偏航(γ) |
≥8° |
≥20°/s |
100°/s2 |
/ |
/ |
|
|
垂直升降(z) |
≥±100mm |
≥200mm/s |
≥3g |
/ |
/ |
|
|
纵向位移(y) |
≥±100mm |
≥250mm/s |
≥3g |
/ |
/ |
|
|
侧向位移(x) |
≥±100mm |
≥250mm/s |
≥3g |
/ |
/ |
|
|
其他 技术指标 |
(1)系统响应频率:0.0HZ~20HZ。 |
|||||
|
(2)平台装机功率:12KW。 |
||||||
P-022六自由度运动平台是我公司为北京一家部队驾校专门开发的一款用于驾驶训练的真实模拟平台,平台上放置的是北京现代伊兰特真车,模拟效果好,体感真实,得到用户好评。

六自由度平台系统控制流程简述如下,微型控制器接收到有关平台运动参数的指令后,经过空间运动模型变换,反解运算,补偿运算,得出六只电动缸的伸长量,通过总线传递给驱动器,由驱动器内部PC得到信息并驱动电动机转动,电动缸按照指令伸缩,平台亦运行到指定姿态。而安装在电动机上的编码器实时检测出电动机的力矩,速度,位置信息并发送到驱动器,构成电动缸闭环控制系统,以实时精确地控制各电动缸的伸长量,同时信息传输给微型控制器,微型控制器通过正解运算,计算出平台实时姿态,实时调整平台姿态,以作为下次动作指令的参考,以确保控制精度。
特点:
a.平台位姿模拟、正弦波模拟、单自由度运动、多自由度复合运动,姿态复合。
b.预置路谱滤波处理,随机波复现,路谱、海浪谱、飞行谱复现等功能,可导入车辆、飞行器实际测量姿态数据。
c.通过TCP/IP协议,为用户提供第三方控制接口(上位机接口),提供二次开发例程。
d.提供内同步、外同步数据输出控制接口,实时正解运动轨迹,指令与姿态实时对比。


电 话:021-67735848
传 真:021-67730370
手 机:15900758649
联系人:潘峰

多自由度 电缸 电动缸价格 电动缸选型 vr飞行驾驶模拟仿真平台 微型电缸 小型电缸
友情链接: