![]()

关注WINHOO微信公众号

 WINHOO产品介绍
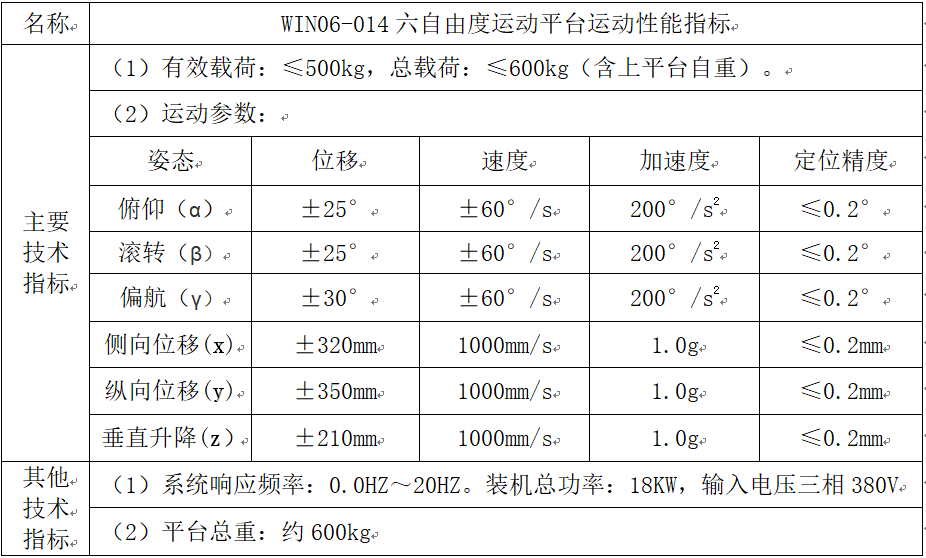
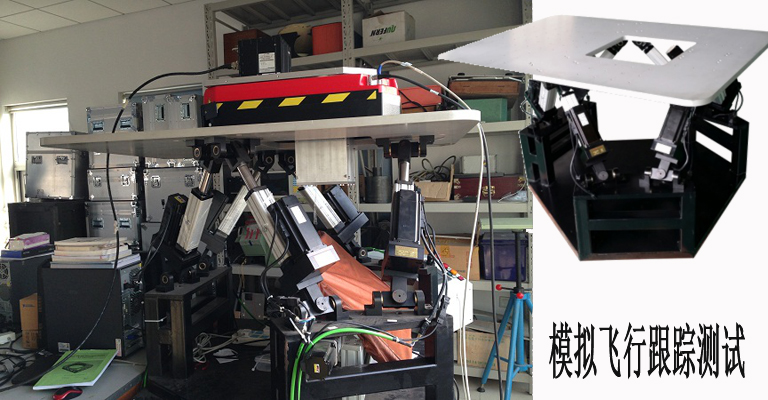
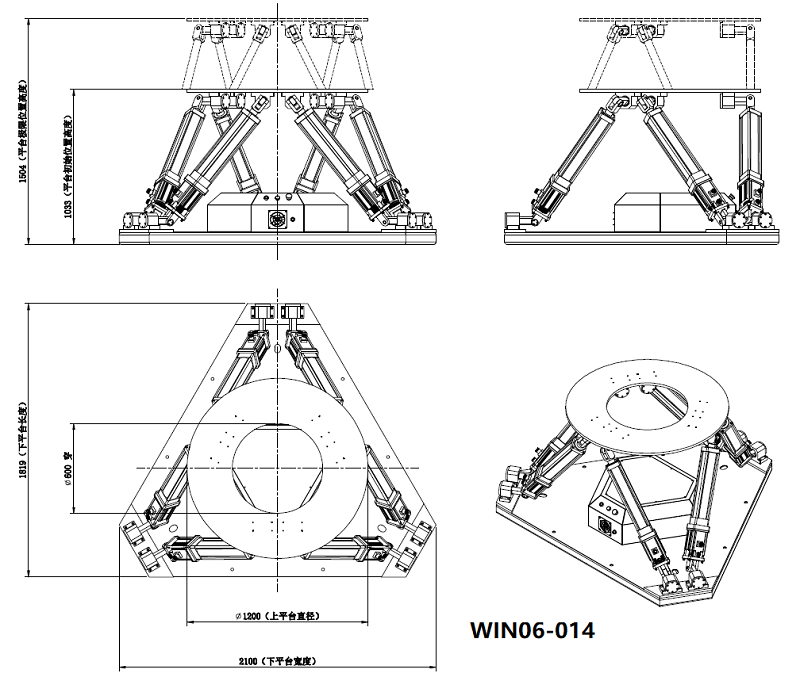
WINHOO产品介绍六自由度平台/仿真测试/稳定平台
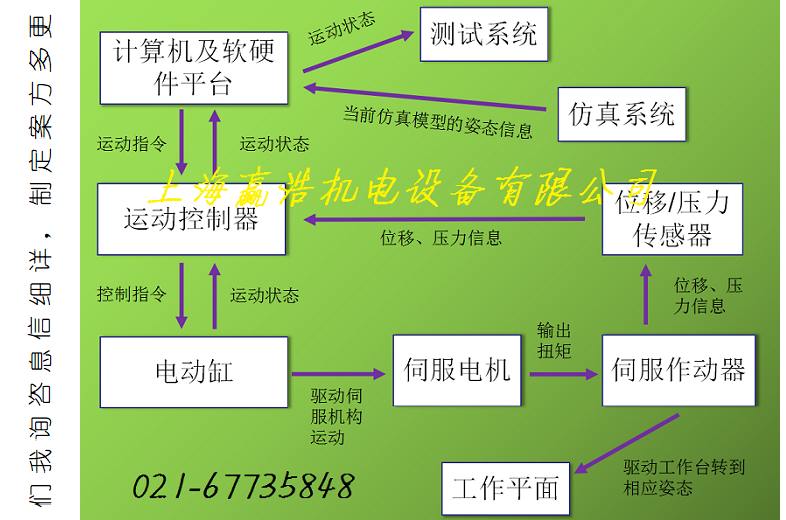
可实现横摇、纵倾、偏航三个角度姿态及横移、前移、升降三个位移,主动控制平台,或稳定平台,多用于仿真模拟测试、姿态复现;
It can achieve three displacement of three angles: roll, pitch and yaw. The active control platform or stable platform is mostly used for simulation test and posture reappearance ;




电 话:021-67735848
传 真:021-67730370
手 机:15900758649
联系人:潘峰

多自由度 电缸 电动缸价格 电动缸选型 vr飞行驾驶模拟仿真平台 微型电缸 小型电缸
友情链接: