

![]()

关注WINHOO微信公众号

 高精度电动缸/高精度仿真平台 >> 六自由度平台 >> 六自由度平台-仿真模拟测试
高精度电动缸/高精度仿真平台 >> 六自由度平台 >> 六自由度平台-仿真模拟测试
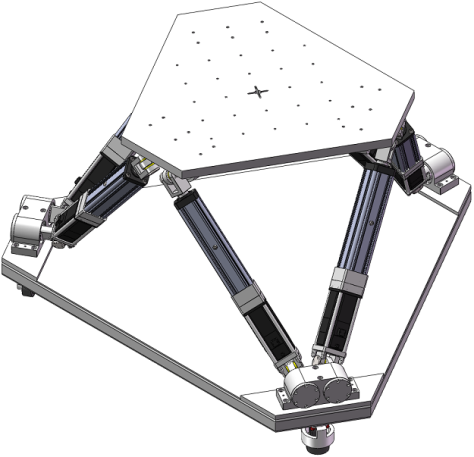
哈尔滨工程大学水下机器人 倒置使用 六自由度模拟平台
三自由度运动平台系统由三自由度运动平台、微型控制器、伺服驱动系统等组成。三自由度运动平台的下平台安装在地面上,上平台为运动平台,它由三只电动缸和三个防扭臂支承,运动平台与电动缸采用三个虎克铰连接,电动缸与固定基座采用三个虎克铰连接,三只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过位姿—缸长解算,通过驱动伺服电机改变电动缸缸长,以实现运动平台的三个自由度的运动,即笛卡尔坐标系内的Z轴上下升降运动和绕X轴和Y轴两个坐标轴的转动。
平台系统由采用Stewart机构的六自由度运动平台、微型控制器、伺服驱动系统等组成。六自由度运动平台的下平台安装在地面上,上平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过位姿-缸长解算,通过驱动伺服电机改变电动缸缸长,以实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。


电 话:021-67735848
传 真:021-67730370
手 机:15900758649
联系人:潘峰

多自由度 电缸 电动缸价格 电动缸选型 vr飞行驾驶模拟仿真平台 微型电缸 小型电缸
友情链接:


